Contexto-ROS¶
- Entrenamiento: CustumObjectDetection
- Implementación: multi_camera_husky
¿Qué es ROS?¶
En su página oficial dice:
Es un sistema operativo para robots, incluye abstracción de software, control de bajo nivel, implementación de funcionalidades comunes, comunicación de mensajes entre procesos. Proveé librerias para obtener, construir, escribir y correr código en multiples computadoras.
ROS Tutorials¶
Sería bueno darse un clavado por los tutoriales de ROS para entender más a profundidad el sistema, y tener algunos tips del manejo del mismo. Pero cuando se entienden estos 2 temas, se tiene una idea a grandes rasgos de como funciona.
Archivos de un robot¶
En la parte de instalación obtendremos un paquete que se llama husky_description en este paquete se define el robot husky, y es esta misma descripción que se usa es husky_test para simular uno o más huskys. Ambos paquetes el cuál están conformado por:
- CMakelists.txt
- config
- include
- launch
- src
- urdf
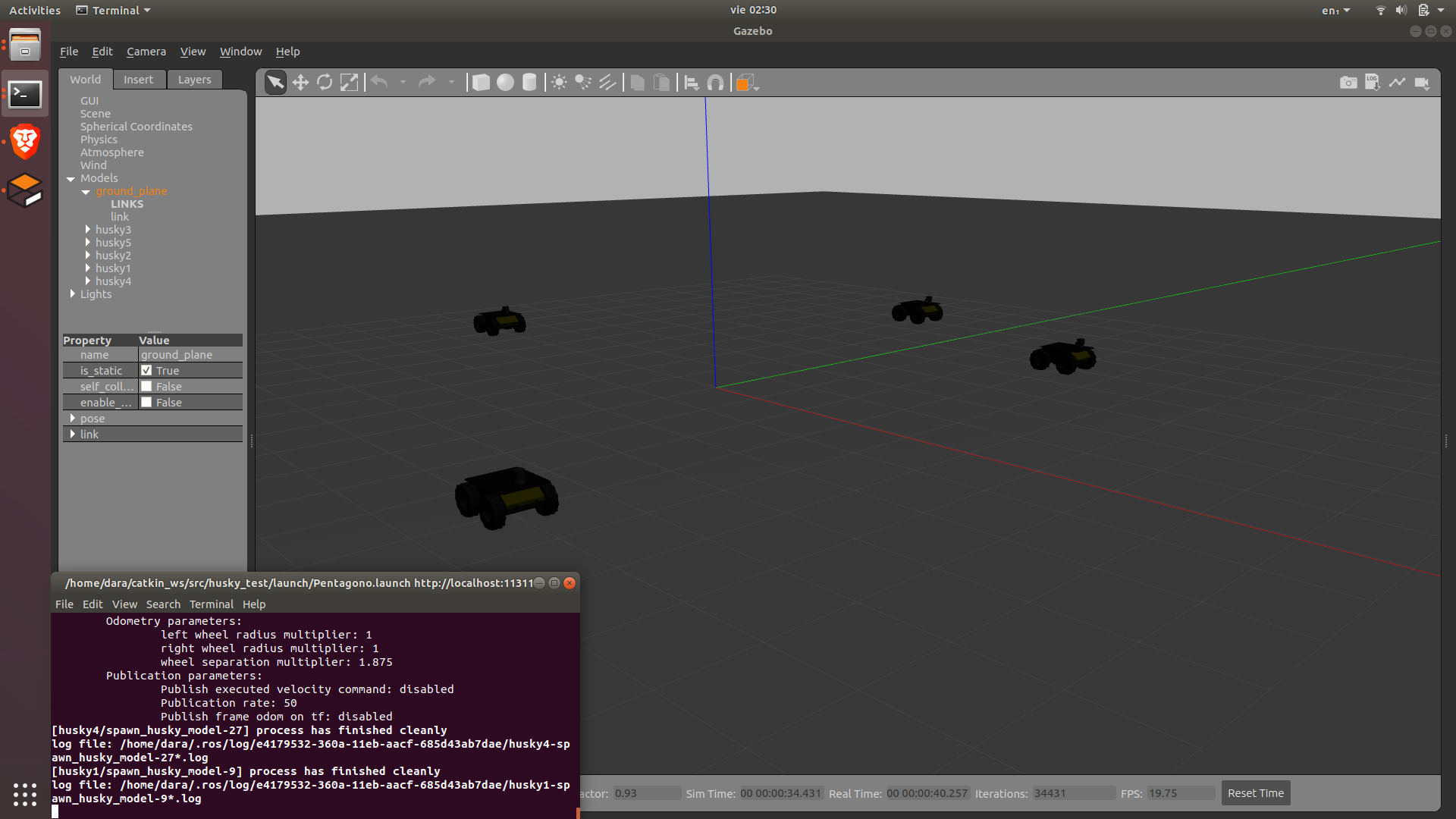
En launch están los archivos necesarios para lanzar un husky, estos toman información de las definiciones que están en urdf. Si se quiere agregar otro husky a la simulación copiar pegar el código de lanzar un husky en launch>Pentagono.launch, modificar el nombre y las coordenadas donde aparece por primera vez para evitar colisión.
roslaunch husky_test Pentagono.launch
Nota
El argumento para agregar la base con la camara kinect montada se cambió aproximadamente a mediados de 2020 en los urdf de kinect_enabled a realsense_enabled. Tomar en cuenta que se tendrá que modificar en el urdf y el .launch .
Nota
Al hacer catkin_make con husky test sale un pequeño error, que hasta el momento no se ha afectado.