Instalación-ROS¶
- Entrenamiento: CustumObjectDetection
- Implementación: multi_camera_husky
Descargar repositorio:¶
Descar multi_camera_husky:
cd ~/Downloads
git clone https://github.com/Daegas/multi_camera_husky
cd multi_camera_husky
En el repositorio viene un archivo .sh con los comandos para instalar:
- ros-melodic-desktop-full
- Algunas dependencias de python
- Paquetes necesarios de husky (description, control, gazebo, viz)
- ros-melodic-teleop-twist-keyboard para controlar los huskys con el teclado
- Crea un workspace.
Este archivo no está probado, se extrajo del historial de bash. Para probarlo:
chmod +x ros-installs.sh
./ros-installs.sh
Su contenido es, en caso de ser necesario correrlo manualmente:
#! /bin/bash
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
sudo apt update
sudo apt install ros-melodic-desktop-full
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
sudo apt install python-rosdep
sudo rosdep init
rosdep update
sudo apt-get install ros-melodic-husky-description -y
sudo apt-get install ros-melodic-husky-control -y
sudo apt-get install ros-melodic-husky-gazebo -y
sudo apt-get install ros-melodic-husky-viz -y
sudo apt-get install ros-melodic-teleop-twist-keyboard
source ./devel/setup.bash
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_make
Ya que se creo catkin_ws, vamos a mover el repositorio multi_camera_husky
mv -r ~/Downloads/multi_camera_husky ~/catkin_ws/src
Podemos borrar el archivo de instalación:
rm ros-installs.sh
Probar¶
Para probar la correcta instalación, intenta correr:
roslaunch husky_gazebo husky_playpen.launch
Y este es el resultado:

Controlar¶
Para poder mover el husky en la simulación, ocupamos el paquete teleop_twist_keyboard
Este paquete publica mensajes en el tópico cmd_vel.
En otra terminal, (no olvides traer la configuración de bash, por cualquier cosa):
source ~/.bashrc
rosrun teleop_twist_keyboard teleop_twist_keyboard.py
Este es el resultado, las instrucciones se imprimen en consola:
Más adelante se ocupará modificar el tópico al que publica, pues es uno diferente para cada husky, esto se logra con:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py cmd_vel:=my_cmd_vel
Es un poco baja la velocidad a la que se mueve, se puede aumentar una vez corrido el comando con z, pero con este comando se modifica desde el principio:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py _speed:=0.46
RQT¶
Es una herramienta que permite visualizar e interacturar con varios elementos de ROS. Para este proyecto principalmente se usa para visualizar la cámara y los nodos de ROS. Mientras en una terminal se está corriendo gazebo, en otra se escribe:
rqt
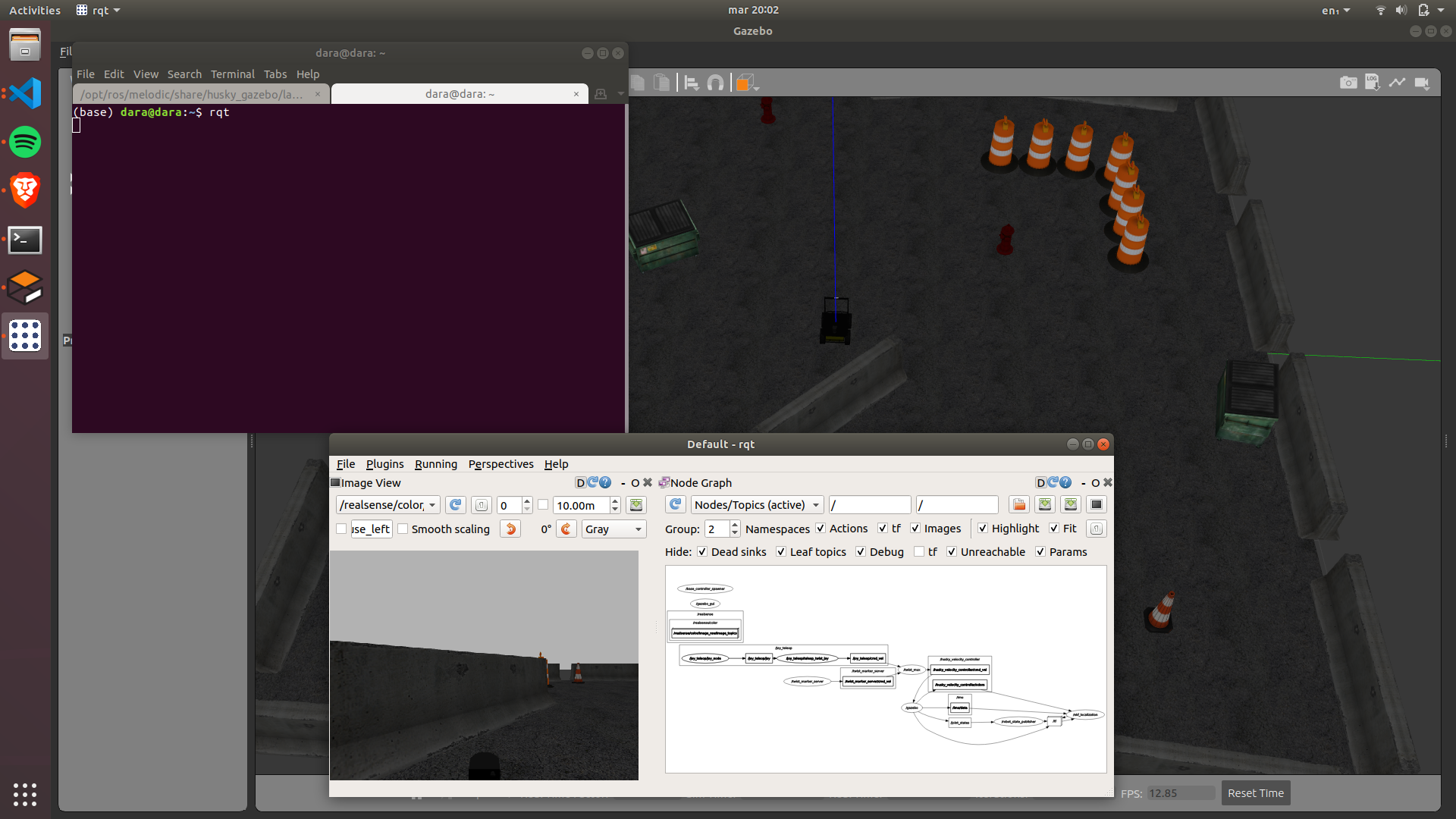
Para ver los nodos: Plugins > Introspection > Node graph .
Para ver la imagen de alguna cámara: Plugins > Visualization > Image view .